Master Thesis
3D Reconstruction and Extrinsic Parameters Calibration of Non-Overlapping Cameras
Abstract
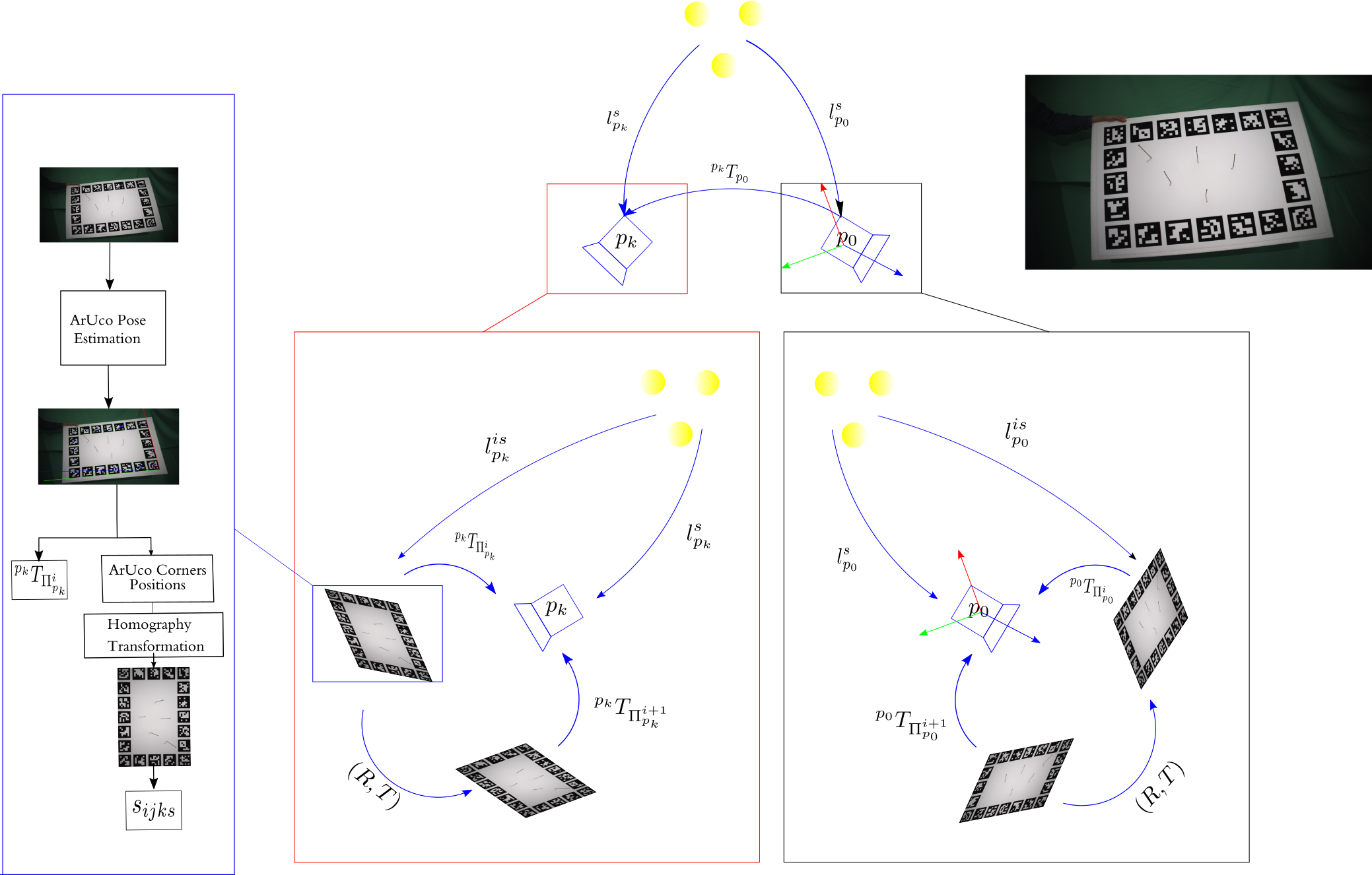
Non-overlapping cameras in multi-camera systems became prevalent in robotics and computer vision research; therefore, it is possible to cover the wide field of view, and researches have been done for computing extrinsic parameters of cameras. These cameras do not have any overlap in their views, so obtaining the corresponding points in their images is somehow impossible. Light and shadow geometry is analogous to Structure from Motion problem. In this thesis, we study Structure from Motion problem and have tried to propose an approach for estimating extrinsic parameters of non-overlapping cameras in multi-camera systems. We formulate the problem by using light and shadow geometry and evaluate our method with synthetic data and real-world experiments. Estimating light coordinate in the reference coordinate system is crucial in photometric stereo problems. In addition to the extrinsic parameters of cameras, the light coordinate is computed by our proposed method.
This master thesis is written in Persian, the english summary can be found here
